给活体蟑螂装控制器
“半机械化昆虫部队”来了
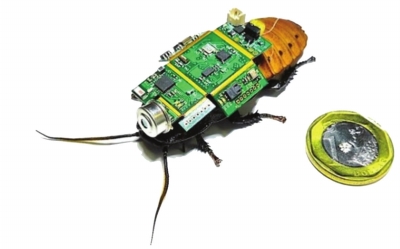 |
| 一只马达加斯加蟑螂改造的半机械昆虫,它背上的电子器件包括运动控制器、无线通信模块和一块小型锂电池。 图片来源:研究团队官网 |
在新加坡南洋理工大学的一间实验室里,佐藤广隆(Hirotaka Sato)教授研究团队正在为一批“特殊的昆虫”做最后的准备。这些昆虫是马达加斯加发声蟑螂,它们将接受一种微型电子背包的安装,成为“半机械化昆虫”(cyborg-insects)。
顾名思义,半机械化昆虫是一台结合了活体昆虫和微型电子控制器的“生物机器人”。研制它的目的是希望它们能穿越复杂地形,为灾后搜救、精准农业或物流优化提供支持。《中国科学报》了解到,佐藤广隆专注于这个研究领域已有10年之久,在他们团队的手中,这种特殊的“机器虫”正准备从幕后走向台前。
半机械化昆虫的十年研发路
佐藤广隆团队的官网显示,早在2015年3月,《当代生物》 (Cur-rent Biology) 期刊就以他们研发的半机械化甲虫为该期封面,并对其原理和应用做了详细的报道。
在此之后,半机械化昆虫的研究和应用在后续数年得到大量关注。尤其是其如何穿越迷宫等复杂地形、挖掘其在地震等灾后协助救援的潜力等方向的研究论文,逐渐涌现在多家不同期刊。
1月6日,在发表在 《自然—通 讯 》 (Nature Communica-tions) 上的论文中,佐藤团队详细介绍了他们在半机械化昆虫技术领域的最新研究成果。这次研究具有多项重要突破,让半机械化昆虫距离实际应用更近了一大步。
论文介绍,马达加斯加发声蟑螂后背上的微型电子背包里,包含了一块主控制板、无线通信模块和一块小型可充电锂电池。佐藤说,安装过程需要极其小心,既要确保电子元件能有效运行,又不能影响昆虫的自然活动。
在佐藤广隆团队的实验室,每只昆虫的背上都被固定了这个装置,接下来,它们将迎来一场前所未有的冒险。
复杂地形中的群体导航实验
佐藤等人在《自然—通讯》上的论文显示,与以往的研究相比,这次实验首次展示了半机械化昆虫在完全未知和障碍密布的地形中的自主导航能力。所谓自主导航能力,是指该团队开发的一种全新的“去中心化群体导航算法”,该算法的导入,使得这些“机械昆虫”能够自发协调行动,无需依赖外部精确的定位系统。
所谓“去中心化群体导航算法”,就是昆虫群不依赖中央控制调度,而是依靠昆虫之间的局部感知和合作,指导它们在没有外部精确定位系统的情况下,完成群体协作任务。
在研究团队最新的实验中,3.5米见方的实验场地上布满了石块和小丘,模拟了灾后废墟的复杂环境。研究团队将这些半机械化昆虫放入场地,并启动导航算法。他们发现,在算法作用下,“半机械化昆虫部队”能够在前述复杂环境中完成任务。
通过简单的规则,让昆虫群体保持队形并有效避开障碍。每只昆虫的行动都会受到邻近昆虫的影响,它们在行进过程中会根据彼此之间的距离和方向不断调整自己的方向。
在经过了10次实验后,实验结果表明,半机械化昆虫群体能够有效地在未知障碍地形中导航,并成功抵达目标位置。TGI算法显著减少了昆虫之间的纠缠现象,提高了导航的安全性和效率。
昆虫并未完全成为“傀儡”
值得一提的是,在这项研究中,研究人员并没有破坏昆虫的神经系统以让它们成为“傀儡”。据论文介绍,昆虫携带的背包通过无线信号与昆虫的神经系统连接,控制者可利用电刺激的方式来控制昆虫的运动。
另据佐藤团队观察,这种外在控制并没有显现出对它们生存状态的显著影响。“实验表明,昆虫在执行任务期间并未表现出明显的健康问题或寿命减少。”佐藤解释说,这大概是因为昆虫的活动虽然被控制,但它们依然能够保持基本的生理活性。
佐藤表示,这种技术的关键在于昆虫依然依赖其自然的运动能力和生理机能,电子设备并未完全替代它们的自然反应,而是通过辅助和引导来提升它们的任务完成能力。因此,昆虫在控制下的存活时间与它们自然的生理周期相似,且没有受到显著的影响。
对于未来的研究方向,佐藤广隆表示,后续研究中将结合惯性测量单元(IMU)和超宽带(UWB)技术,进一步提升半机械化昆虫的自主定位能力。同时还将更加真实具体的模拟算法在物流、灾害响应、农业等实际场景中的应用潜力。
来源:中国科学报